

接下来我们来看看具体的代码实现。首先,导入所需的库和函数。
- numpy,⽤于处理各种数值计算
- skimage,⽤于读⼊、保存图⽚以及RGB模式和Lab模式的相互转化
- sklearn,提供K近邻算法的接⼝
In [1]:
# 支持向量和矩阵运算的库
import numpy as np
# 图片输入输出
from skimage import io
# 图片格式转换
from skimage.color import rgb2lab, lab2rgb
# KNN模型
from sklearn.neighbors import KNeighborsRegressor
# 系统命令
import os
# 绘图
import matplotlib.pyplot as plt
# 文件夹前缀
dir_prefix = "../input/knn-styletransfer/"
In [2]:
data_dir = dir_prefix + "vangogh-style/"
# os.listdir(data_dir)
for file in os.listdir(data_dir):
print(file)
img = io.imread(os.path.join(data_dir, file))
plt.imshow(img)
plt.show()










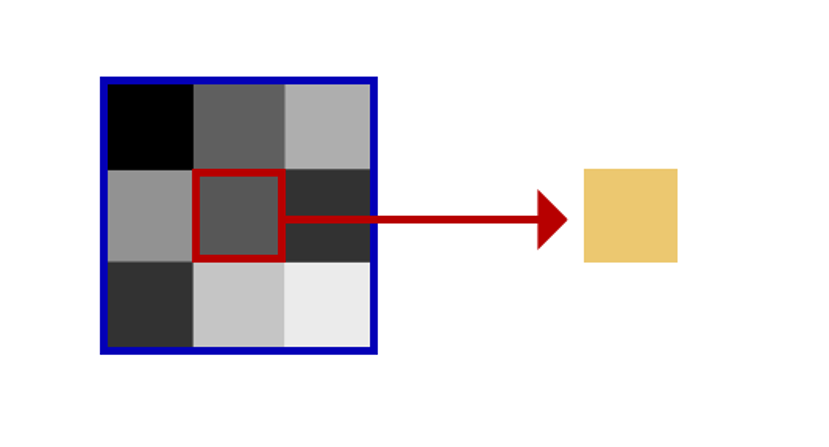
读入图像,返回图像中所有$3 \times 3$灰度矩阵到中心点色彩值的映射关系。
In [3]:
# block_size即从像素点向外扩展几层像素,扩展1层即3*3
block_size = 1
# 读入风格图像, 得到映射 X -> Y
# X: 储存3*3像素格的灰度值
# Y: 储存中心像素格的色彩值
def read_style_image(file_name, size=block_size):
# --------------------------------------------------------------------------
# io.imread:
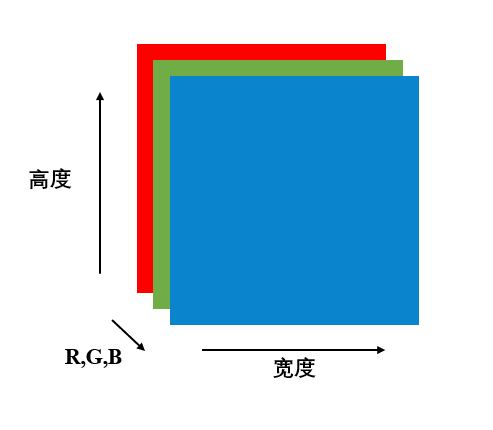
# 输入一个图片文件,从中读取图片并保存成rgb格式,即3个M*N的矩阵,输出这个张量(M*N*3的列表)
# https://scikit-image.org/docs/dev/api/skimage.io.html#skimage.io.imread
# --------------------------------------------------------------------------
img = io.imread(file_name)
# print(img)
# print(img.shape)
plt.imshow(img)
plt.show()
# --------------------------------------------------------------------------
# rgb2lab:
# 输入一张rgb格式的图片对应的张量(M*N*3的列表),将其转成lab格式,输出转换后的张量(M*N*3的列表)
# https://scikit-image.org/docs/dev/api/skimage.color.html?highlight=rgb2lab#skimage.color.rgb2lab
# --------------------------------------------------------------------------
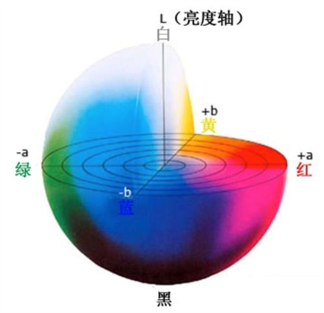
img = rgb2lab(img)
# plt.imshow(img)
# plt.show()
# 取出图片的宽度和高度,img.shape可以得到图片的维度列表,取列表前两位,即M和N
w, h = img.shape[:2]
# print(img.shape[:])
# 初始化函数的输出,即两个列表X和Y,表示3*3灰度矩阵(X)到中心点色彩值(Y)的映射
X = []
Y = []
# 用for循环枚举图像中的全部可能的中心点,因为需要从中心点向外扩展1层,所以枚举范围从(0, w)变成(1, w - 1)
for x in range(size, w - size):
for y in range(size, h - size):
# ------------------------------------------------------------------
# 枚举好中心点位置,即坐标(x, y)后,分别求该中心点对应的3*3灰度矩阵(X)和中心点色彩值(Y)
#
# 从中心点向外扩一圈,得到一个3*3矩阵,用[x - size : x + size + 1, y - size : y + size + 1]取到这个矩阵
# 并在第三个维度上取值为0,即l通道对应的灰度值
#
# array.reshape():
# 将目标array调整成所需的维度形状,-1表示某一位缺省,可由其他维度推理得到
# https://docs.scipy.org/doc/numpy/reference/generated/numpy.reshape.html
# ------------------------------------------------------------------
X.append(img[x - size : x + size + 1, y - size : y + size + 1, 0].reshape(-1))
# 取出中心点对应的色彩值,即在第三个维度上去值为1和2,即ab通道对应的色彩值
Y.append(img[x, y, 1:])
print("finish reading " + file_name)
return X, Y
In [4]:
# 风格图像路径
style_data = dir_prefix + "kNNstyle.jpg"
# 读取风格图像,构建KNN映射数据集
X, Y = read_style_image(style_data)

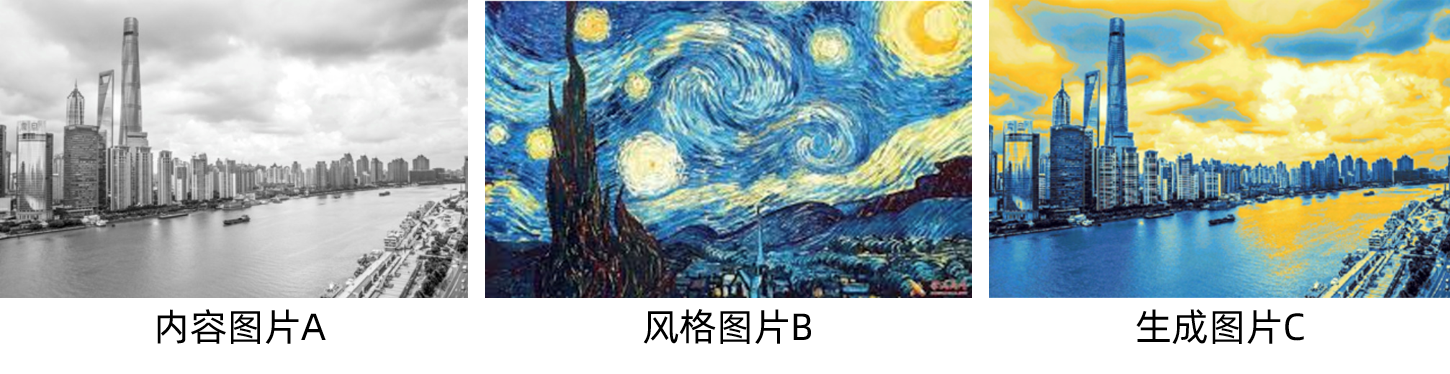
读取若风格图像构建数据集。
In [5]:
# 风格图像文件夹路径
style_data_dir = dir_prefix + "vangogh-style/"
# 读取风格图像文件夹中的number张图像,这里number=1
# 输出由风格图像构建的映射数据集
def create_dataset(data_dir=style_data_dir, number=5):
# 初始化函数输出
X = []
Y = []
n = 0
# print(os.listdir(data_dir))
for file in os.listdir(data_dir):
print("reading", file)
X0, Y0 = read_style_image(os.path.join(data_dir, file))
X.extend(X0)
Y.extend(Y0)
n += 1
if n >= number:
break
return X, Y
# 调用构建映射数据集的函数
print("reading data")
X, Y = create_dataset(number=10)
print("finish reading")
建立kNN模型,设置k=4,即预测的色彩值是与其最近的4个点的色彩值的加权平均,其权重与距离的倒数成正比。
In [6]:
# 初始化kNN模型,将邻居数设为4
# https://scikit-learn.org/stable/modules/generated/sklearn.neighbors.KNeighborsRegressor.html
nbrs = KNeighborsRegressor(n_neighbors=4, weights='distance')
print("start fitting")
# 用X和Y构建kNN模型
nbrs.fit(X, Y)
print("finish fitting")
处理内容图片得到若干$3 \times 3$的灰度矩阵。
In [7]:
# 整段填空
def split_origin_image(img, size=block_size):
w, h = img.shape[:2]
X = []
for x in range(size, w - size):
for y in range(size, h - size):
X.append(img[x - size : x + size + 1, y - size : y + size + 1, 0].reshape(-1))
return X
根据kNN算法得到色彩风格迁移后的图像。
In [8]:
# 输入内容图像,根据已经建立好的kNN模型,输出色彩风格迁移后的图像。
def rebuild(file_name, size=block_size):
img = io.imread(file_name)
# 打印内容图像
plt.imshow(img)
plt.show()
print(img.shape)
img = rgb2lab(img)
w, h = img.shape[:2]
# 初始化输出图像对应的张量
photo = np.zeros([w, h, 3])
# 取出内容图像的全部3*3灰度矩阵
X = split_origin_image(img)
print("start predicting")
# 调用kNN模型的predict方法,对于输入的一系列3*3灰度矩阵X,求得其各自对应的色彩的回归值
# 调用reshape方法将输出的色彩值调整到图片对应的维度
p_ab = nbrs.predict(X)
print(p_ab.shape)
p_ab = p_ab.reshape(w - 2 * size, h - 2 * size, -1)
print("finish predicting")
# 枚举输出图像的每个像素,最外圈无法作为中心点,因此不赋值(黑框?)
for x in range(size, w - size):
for y in range(size, h - size):
# 分别对输出图像的3个通道赋值
photo[x, y, 0] = img[x, y, 0]
# 后两个通道的值p_ab是从0开始的,所以坐标需要向左上偏移1个像素
photo[x, y, 1] = p_ab[x - size, y - size, 0]
photo[x, y, 2] = p_ab[x - size, y - size, 1]
photo = photo[size : w - size, size : h - size, :]
return photo
# 内容图像路径
input_path = dir_prefix + "input.jpg"
# 生成图像
new_photo = rebuild(input_path)
# 输出图像路径
output_path = "output.jpg"
# 保存输出图像
io.imsave(output_path, lab2rgb(new_photo))
# 打印输出图像
plt.imshow(lab2rgb(new_photo))
plt.show()
print(new_photo.shape)

